2023
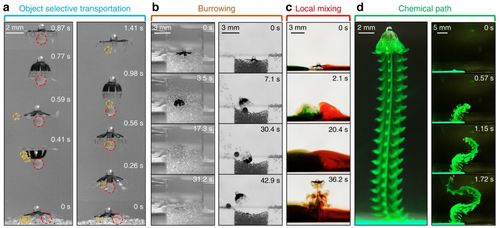
Wang, T., Joo, H., Song, S., Hu, W., Keplinger, C., Sitti, M.
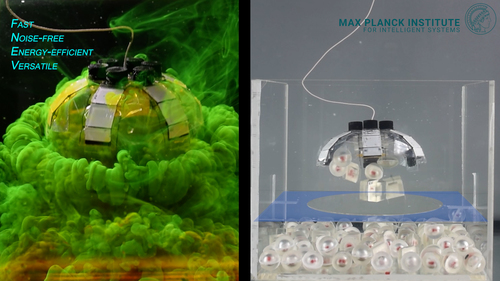
A Versatile Jellyfish-Like Robotic Platform for Effective Underwater Propulsion and Manipulation
Science Advances, 9(15), American Association for the Advancement of Science, April 2023, Tianlu Wang and Hyeong-Joon Joo contributed equally to this work. (article)
2022
Li, M., Tang, Y., Soon, R. H., Dong, B., Hu, W., Sitti, M.
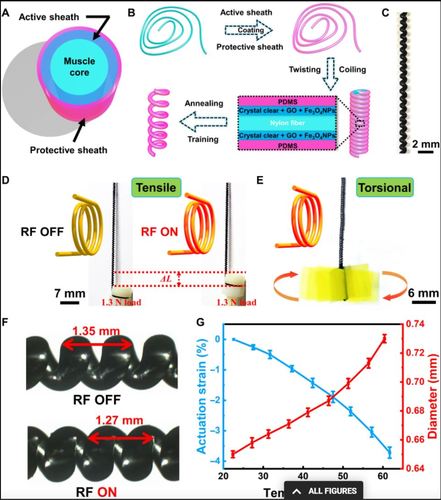
Miniature coiled artificial muscle for wireless soft medical devices
Science Advances, 8(10):eabm5616, March 2022 (article)
2021
Zhang, J., Guo, Y., Hu, W., Soon, R. H., Davidson, Z. S., Sitti, M.
Liquid crystal elastomer-based magnetic composite films for reconfigurable shape-morphing soft miniature machines
Advanced Materials, 33(8):2006191, 2021 (article)
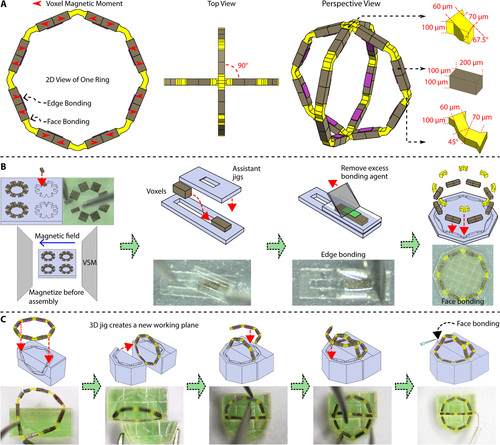
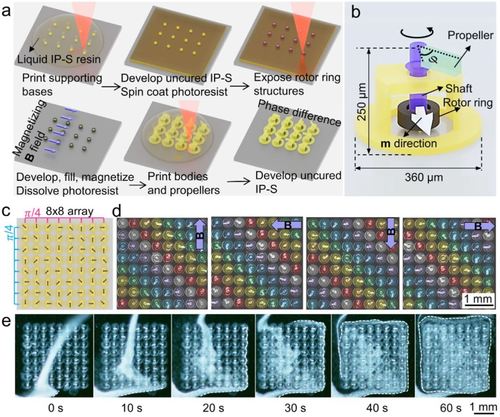
Zhang, J., Ren, Z., Hu, W., Soon, R. H., Yasa, I. C., Liu, Z., Sitti, M.
Voxelated three-dimensional miniature magnetic soft machines via multimaterial heterogeneous assembly
Science Robotics, 6(53):eabf0112, 2021 (article)
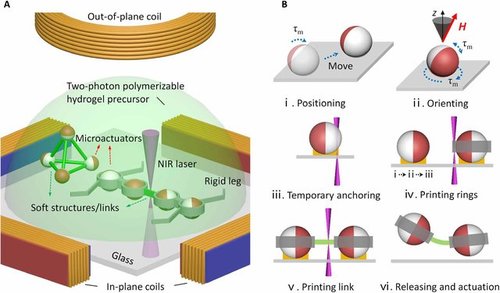
Hu, X., Yasa, I. C., Ren, Z., Goudu, S. R., Ceylan, H., Hu, W., Sitti, M.
Magnetic soft micromachines made of linked microactuator networks
Science Advances, 7(23):eabe8436, 2021 (article)
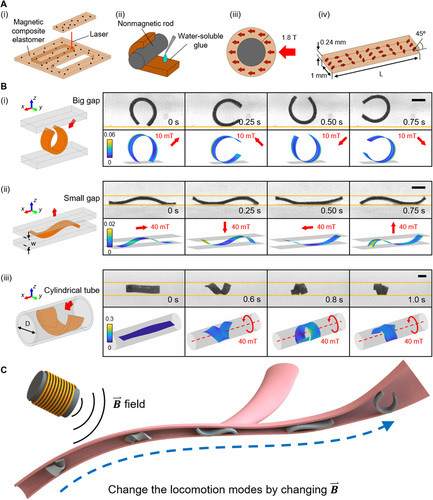
Ren, Z., Zhang, R., Soon, R. H., Liu, Z., Hu, W., Onck, P. R., Sitti, M.
Soft-bodied adaptive multimodal locomotion strategies in fluid-filled confined spaces
Science Advances, 7(27):eabh2022, 2021 (article)
Zhang, J., Guo, Y., Hu, W., Sitti, M.
Stimuli-Responsive Materials: Wirelessly Actuated Thermo-and Magneto-Responsive Soft Bimorph Materials with Programmable Shape-Morphing (Adv. Mater. 30/2021)
Advanced Materials, 33(30):2170238, 2021 (misc)
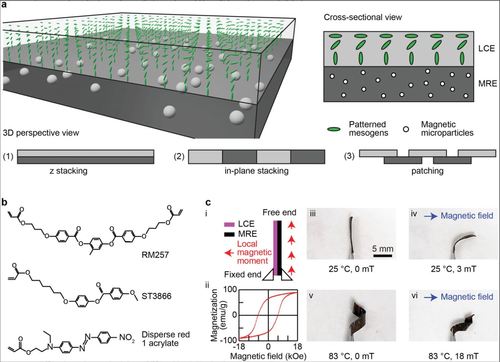
Zhang, J., Guo, Y., Hu, W., Sitti, M.
Wirelessly actuated thermo‐and magneto‐responsive soft bimorph materials with programmable shape‐morphing
Advanced Materials, 33(30):2100336, 2021 (article)
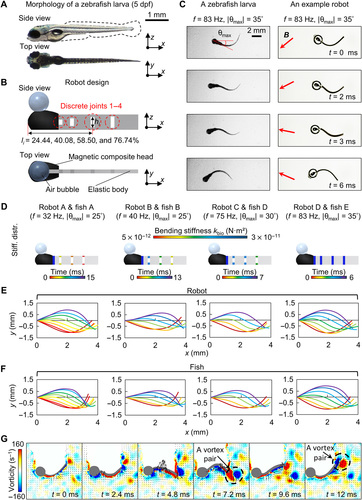
Wang, T., Ren, Z., Hu, W., Li, M., Sitti, M.
Effect of body stiffness distribution on larval fish–like efficient undulatory swimming
Science Advances, 7(19):eabf7364, 2021 (article)
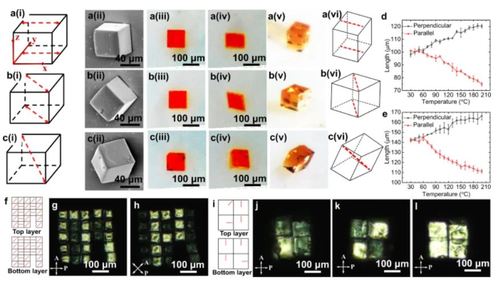
Guo, Y., Zhang, J., Hu, W., Khan, M. T. A., Sitti, M.
Shape-programmable liquid crystal elastomer structures with arbitrary three-dimensional director fields and geometries
Nature Communications, 12, pages: 5936, 2021 (article)
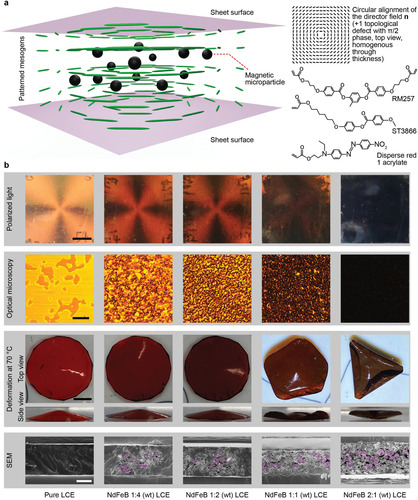
Zhang, J., Guo, Y., Hu, W., Soon, R. H., Davidson, Z. S., Sitti, M.
Smart actuators: liquid crystal elastomer-based magnetic composite films for reconfigurable shape-morphing soft Miniature Machines (Adv. Mater. 8/2021)
Advanced Materials, 33(8):2170054, 2021 (misc)

Chu, X., Wang, W., Müller, J., Schöning, H. V., Liu, Y., Weigand, B.
Turbulence Modulation and Energy Transfer in Turbulent Channel Flow Coupled with One-Side Porous Media
In High Performance Computing in Science and Engineering’20, pages: 373-386, Springer, 2021 (incollection)
Wang, W., Chu, X., Lozano-Durán, A., Helmig, R., Weigand, B.
Information transfer between turbulent boundary layers and porous media
Journal of Fluid Mechanics, 920, Cambridge University Press, 2021 (article)
Chu, X., Wang, W., Yang, G., Terzis, A., Helmig, R., Weigand, B.
Transport of turbulence across permeable interface in a turbulent channel flow: interface-resolved direct numerical simulation
Transport in Porous Media, 136(1):165-189, Springer, 2021 (article)
Wang, W., Pan, C., Wang, J.
Energy transfer structures associated with large-scale motions in a turbulent boundary layer
Journal of Fluid Mechanics, 906, Cambridge University Press, 2021 (article)
Wang, W., Yang, G., Evrim, C., Terzis, A., Helmig, R., Chu, X.
An assessment of turbulence transportation near regular and random permeable interfaces
Physics of Fluids, 33(11):115103, AIP Publishing LLC, 2021 (article)
2020
Goudu, S. R., Yasa, I. C., Hu, X., Ceylan, H., Hu, W., Sitti, M.
Biodegradable untethered magnetic hydrogel milli-grippers
Advanced Functional Materials, 30(50):2004975, 2020 (article)
Hu, W., Lum, G. Z., Mastrangeli, M., Sitti, M.
Method of actuating a shape changeable member, shape changeable member and actuating system
Google Patents, January 2020, US Patent App. 16/477,593 (patent)
Wang, T., Hu, W., Ren, Z., Sitti, M.
Ultrasound-guided wireless tubular robotic anchoring system
IEEE Robotics and Automation Letters, 5(3):4859-4866, IEEE, 2020 (article)
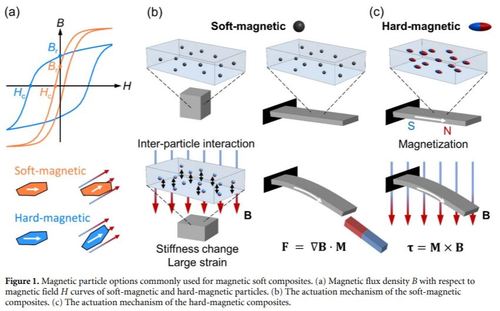
Wu, S., Hu, W., Ze, Q., Sitti, M., Zhao, R.
Multifunctional magnetic soft composites: a review
Multifunctional Materials, 3(4):042003, 2020 (article)
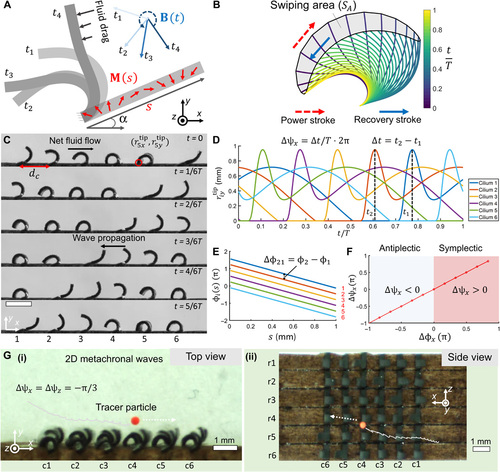
Dong, X., Lum, G. Z., Hu, W., Zhang, R., Ren, Z., Onck, P. R., Sitti, M.
Bioinspired cilia arrays with programmable nonreciprocal motion and metachronal coordination
Science Advances, 6(45):eabc9323, 2020 (article)
Chu, X., Liu, Y., Wang, W., Yang, G., Weigand, B., Nemati, H.
Turbulence, pseudo-turbulence, and local flow topology in dispersed bubbly flow
Physics of Fluids, 32(8):083310, AIP Publishing LLC, 2020 (article)
2019
Ziyu Ren, T. W., Hu, W.
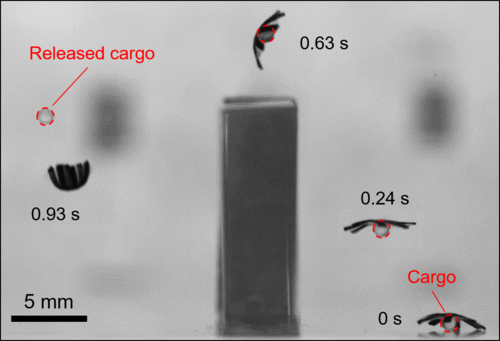
A magnetically-actuated untethered jellyfish-inspired soft milliswimmer
Robotics: Science and Systems, June 2019 (conference)
Ren, Z., Hu, W., Dong, X., Sitti, M.
Multi-functional soft-bodied jellyfish-like swimming
Nature communications, 10(1):2703, 2019 (article)

Hakan Ceylan, I. C. Y. U. K. W. H. M. S.
Translational prospects of untethered medical microrobots
Progress in Biomedical Engineering, 1, pages: 012002, 2019 (article)
Wang, W., Pan, C., Wang, J.
Multi-component variational mode decomposition and its application on wall-bounded turbulence
Experiments in Fluids, 60(6):1-16, Springer, 2019 (article)
2018
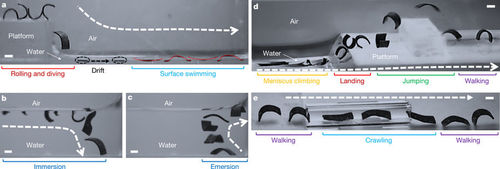
Hu, W., Lum, G. Z., Mastrangeli, M., Sitti, M.
Small-scale soft-bodied robot with multimodal locomotion
Nature, 554, pages: 81-85, Nature, January 2018 (article)
Wang, W., Pan, C., Wang, J.
Quasi-bivariate variational mode decomposition as a tool of scale analysis in wall-bounded turbulence
Experiments in Fluids, 59(1):1-18, Springer, 2018 (article)
Wang, W., Pan, C., Wang, J.
Wall-normal variation of spanwise streak spacing in turbulent boundary layer with low-to-moderate Reynolds number
Entropy, 21(1):24, MDPI, 2018 (article)
2017
Hu, W., Ohta, A. T.
Editorial for the special issue on microdevices and microsystems for cell manipulation
Micromachines, 8(9):276, 2017 (article)
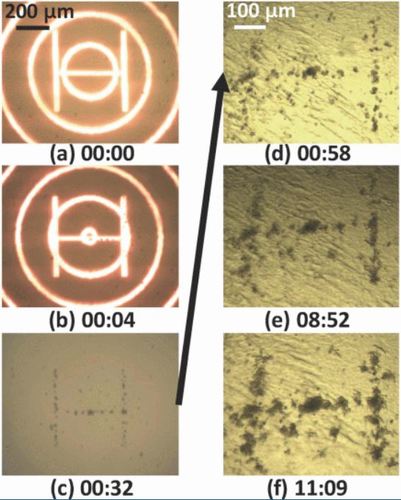
Fan, Q., Hu, W., Ohta, A. T.
Localized Single-Cell Lysis and Manipulation Using Optothermally-Induced Bubbles
Micromachines, 8(4):121, 2017 (article)
2016
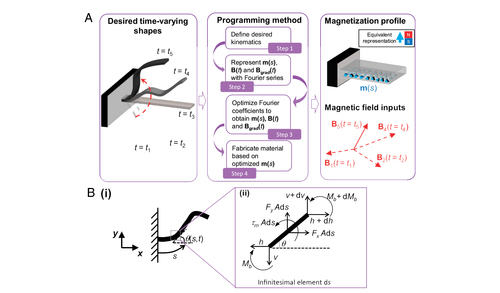
Lum, G. Z., Ye, Z., Dong, X., Marvi, H., Erin, O., Hu, W., Sitti, M.
Shape-programmable magnetic soft matter
Proceedings of the National Academy of Sciences, 113(41):E6007–E6015, 2016 (article)
Hu, W., Ishii, K., Ohta, A. T.
Cell patterning in a hydrogel using optically induced dielectrophoresis
In Optical MEMS and Nanophotonics (OMN), 2016 International Conference on, pages: 1-2, 2016 (inproceedings)
2015
Sitti, M., Ceylan, H., Hu, W., Giltinan, J., Turan, M., Yim, S., Diller, E.
Biomedical applications of untethered mobile milli/microrobots
Proceedings of the IEEE, 103(2):205-224, IEEE, March 2015 (article)
Fan, Q., Hu, W., Ohta, A. T.
Efficient single-cell poration by microsecond laser pulses
Lab on a Chip, 15(2):581-588, Royal Society of Chemistry, 2015 (article)
2014
Gough, R. C., Morishita, A. M., Dang, J. H., Hu, W., Shiroma, W. A., Ohta, A. T.
Continuous electrowetting of non-toxic liquid metal for RF applications
IEEE Access, 2, pages: 874-882, IEEE, 2014 (article)
Fan, Q., Hu, W., Ohta, A. T.
Laser-induced microbubble poration of localized single cells
Lab on a Chip, 14(9):1572-1578, Royal Society of Chemistry, 2014 (article)
Dang, J. H., Morishita, A. M., Gough, R. C., Hu, W., Ohta, A. T., Shiroma, W. A.
Liquid-metal reconfigurable RF components and antennas
In Radio Science Meeting (USNC-URSI NRSM), 2014 United States National Committee of URSI National, pages: 1-1, 2014 (inproceedings)
Fan, Q., Hu, W., Ohta, A. T.
Molecular delivery and transfection by laser-induced oscillating microbubbles
In Nano/Micro Engineered and Molecular Systems (NEMS), 2014 9th IEEE International Conference on, pages: 302-305, 2014 (inproceedings)
Hu, W.
Opto-thermal micro-transportation for cellular microbiology
University of Hawai’i at Manoa, 2014 (phdthesis)
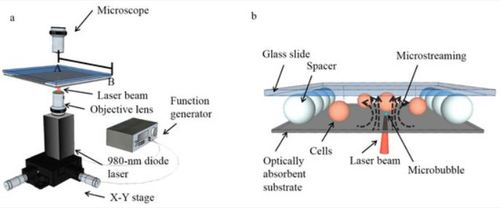
Hu, W., Fan, Q., Ohta, A. T.
Interactive actuation of multiple opto-thermocapillary flow-addressed bubble microrobots
Robotics and biomimetics, 1(1):14, Springer Berlin Heidelberg, 2014 (article)
2013
Hu, W., Fan, Q., Ohta, A. T.
An opto-thermocapillary cell micromanipulator
Lab on a Chip, 13(12):2285-2291, Royal Society of Chemistry, 2013 (article)
Hu, W., Fan, Q., Tonaki, W., Ohta, A. T.
Bubble-driven light-absorbing hydrogel microrobot for the assembly of bio-objects
In Engineering in Medicine and Biology Society (EMBC), 2013 35th Annual International Conference of the IEEE, pages: 5303-5306, 2013 (inproceedings)
Hu, W., Fan, Q., Ohta, A.
Assembly of cell-laden microgels by an optically controlled bubble manipulator
In International Conference on Miniaturized Systems for Chemistry and Life Sciences, Freiburg, Germany, 2013 (inproceedings)
Tonaki, W. G., Hu, W., Ohta, A. T., Shiroma, W. A.
A reconfigurable, liquid-metal-based low-pass filter with reversible tuning
In Wireless Symposium (IWS), 2013 IEEE International, pages: 1-3, 2013 (inproceedings)
Lee, T., Shin, Y., Park, M.
Miniaturisation for chemistry, physics, biology, materials science and bioengineering
Lab Chip, 13, pages: 81-89, 2013 (article)
2012
Ishii, K. S., Hu, W., Ohta, A. T.
Cooperative micromanipulation using optically controlled bubble microrobots
In Robotics and Automation (ICRA), 2012 IEEE International Conference on, pages: 3443-3448, 2012 (inproceedings)
Hu, W., Ishii, K. S., Ohta, A. T.
Micro-assembly using optically controlled bubble microrobots in saline solution
In Robotics and Automation (ICRA), 2012 IEEE International Conference on, pages: 733-738, 2012 (inproceedings)