2023
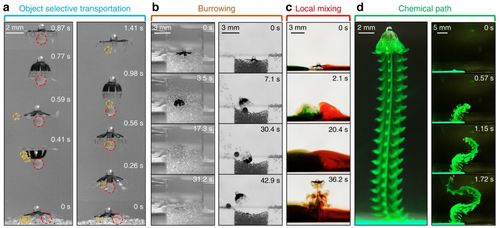
Wang, T., Joo, H., Song, S., Hu, W., Keplinger, C., Sitti, M.
A Versatile Jellyfish-Like Robotic Platform for Effective Underwater Propulsion and Manipulation
Science Advances, 9(15), American Association for the Advancement of Science, April 2023, Tianlu Wang and Hyeong-Joon Joo contributed equally to this work. (article)
2022
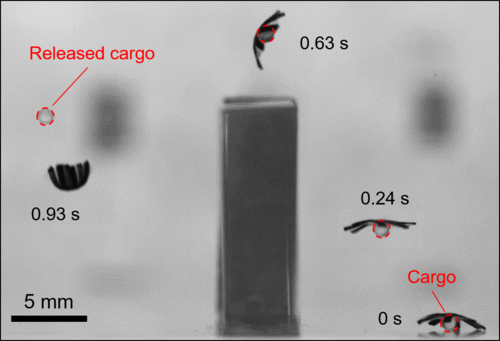
Li, M., Tang, Y., Soon, R. H., Dong, B., Hu, W., Sitti, M.
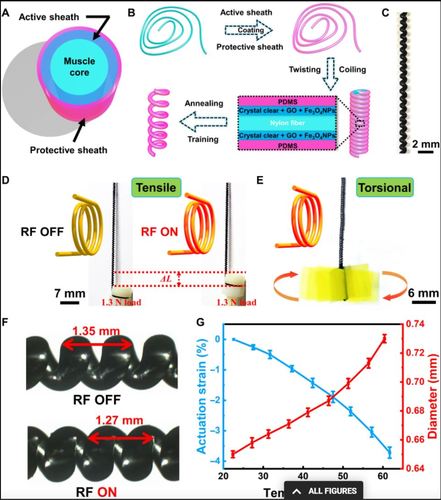
Miniature coiled artificial muscle for wireless soft medical devices
Science Advances, 8(10):eabm5616, March 2022 (article)
2021
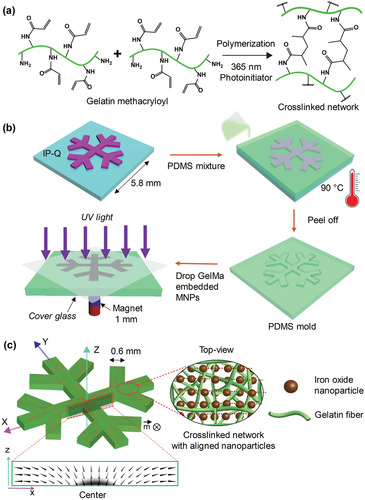
Zhang, J., Guo, Y., Hu, W., Soon, R. H., Davidson, Z. S., Sitti, M.
Liquid crystal elastomer-based magnetic composite films for reconfigurable shape-morphing soft miniature machines
Advanced Materials, 33(8):2006191, 2021 (article)
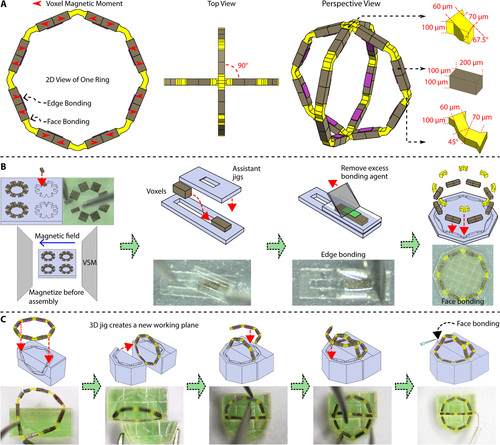
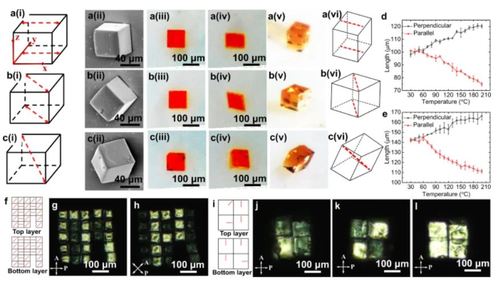
Zhang, J., Ren, Z., Hu, W., Soon, R. H., Yasa, I. C., Liu, Z., Sitti, M.
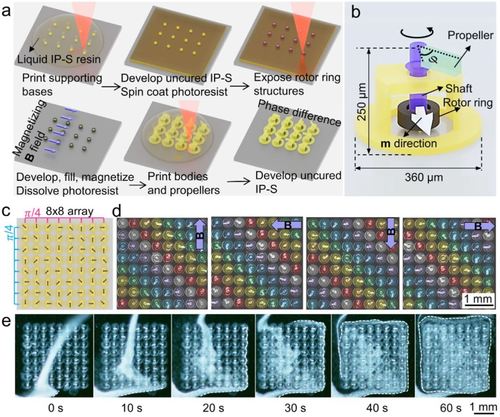
Voxelated three-dimensional miniature magnetic soft machines via multimaterial heterogeneous assembly
Science Robotics, 6(53):eabf0112, 2021 (article)
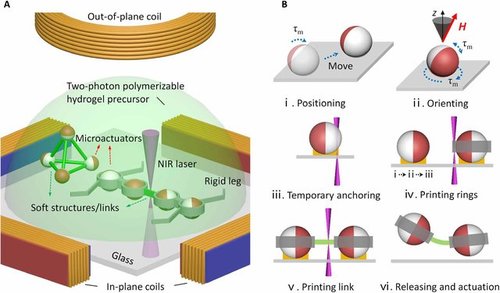
Hu, X., Yasa, I. C., Ren, Z., Goudu, S. R., Ceylan, H., Hu, W., Sitti, M.
Magnetic soft micromachines made of linked microactuator networks
Science Advances, 7(23):eabe8436, 2021 (article)
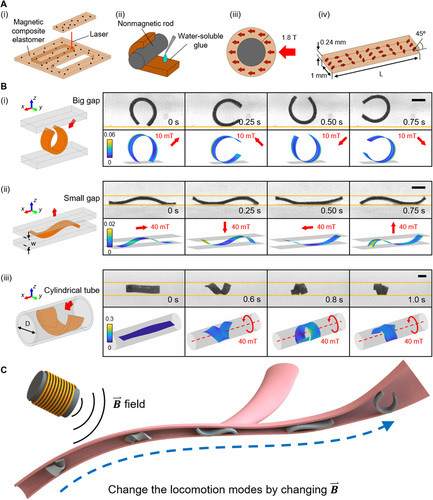
Ren, Z., Zhang, R., Soon, R. H., Liu, Z., Hu, W., Onck, P. R., Sitti, M.
Soft-bodied adaptive multimodal locomotion strategies in fluid-filled confined spaces
Science Advances, 7(27):eabh2022, 2021 (article)
Zhang, J., Guo, Y., Hu, W., Sitti, M.
Stimuli-Responsive Materials: Wirelessly Actuated Thermo-and Magneto-Responsive Soft Bimorph Materials with Programmable Shape-Morphing (Adv. Mater. 30/2021)
Advanced Materials, 33(30):2170238, 2021 (misc)
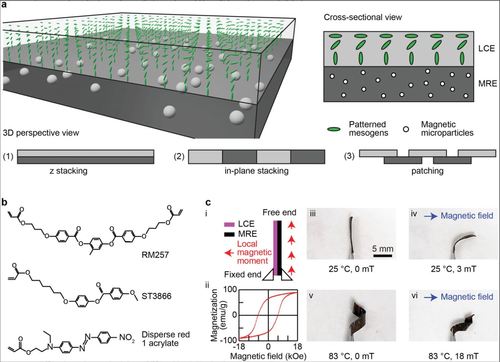
Zhang, J., Guo, Y., Hu, W., Sitti, M.
Wirelessly actuated thermo‐and magneto‐responsive soft bimorph materials with programmable shape‐morphing
Advanced Materials, 33(30):2100336, 2021 (article)
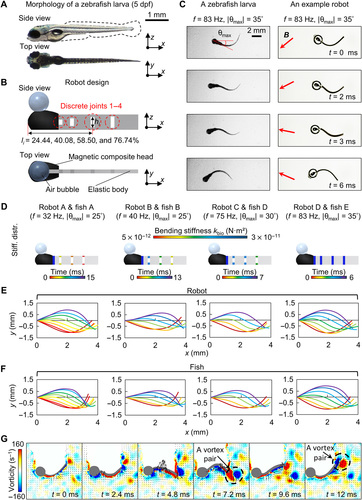
Wang, T., Ren, Z., Hu, W., Li, M., Sitti, M.
Effect of body stiffness distribution on larval fish–like efficient undulatory swimming
Science Advances, 7(19):eabf7364, 2021 (article)
Guo, Y., Zhang, J., Hu, W., Khan, M. T. A., Sitti, M.
Shape-programmable liquid crystal elastomer structures with arbitrary three-dimensional director fields and geometries
Nature Communications, 12, pages: 5936, 2021 (article)
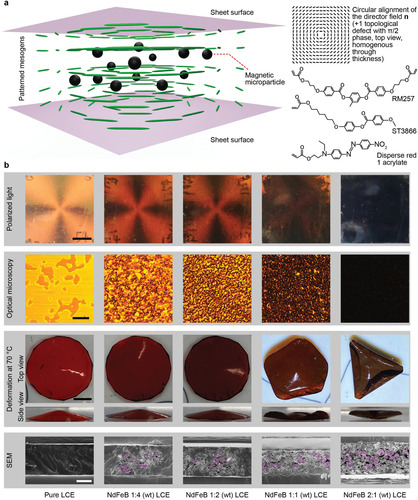
Zhang, J., Guo, Y., Hu, W., Soon, R. H., Davidson, Z. S., Sitti, M.
Smart actuators: liquid crystal elastomer-based magnetic composite films for reconfigurable shape-morphing soft Miniature Machines (Adv. Mater. 8/2021)
Advanced Materials, 33(8):2170054, 2021 (misc)
2020
Goudu, S. R., Yasa, I. C., Hu, X., Ceylan, H., Hu, W., Sitti, M.
Biodegradable untethered magnetic hydrogel milli-grippers
Advanced Functional Materials, 30(50):2004975, 2020 (article)
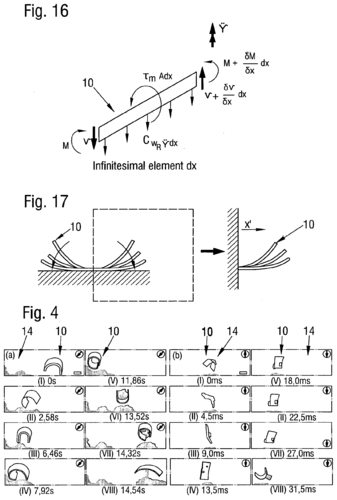
Hu, W., Lum, G. Z., Mastrangeli, M., Sitti, M.
Method of actuating a shape changeable member, shape changeable member and actuating system
Google Patents, January 2020, US Patent App. 16/477,593 (patent)
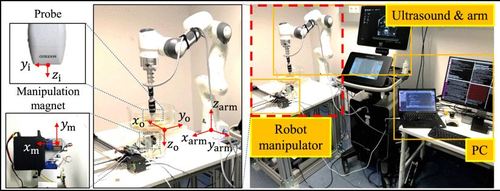
Wang, T., Hu, W., Ren, Z., Sitti, M.
Ultrasound-guided wireless tubular robotic anchoring system
IEEE Robotics and Automation Letters, 5(3):4859-4866, IEEE, 2020 (article)
Wu, S., Hu, W., Ze, Q., Sitti, M., Zhao, R.
Multifunctional magnetic soft composites: a review
Multifunctional Materials, 3(4):042003, 2020 (article)
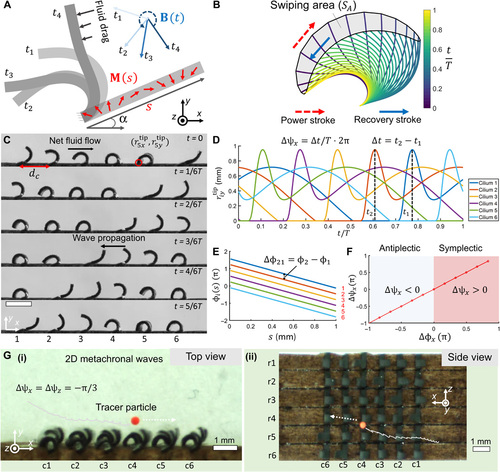
Dong, X., Lum, G. Z., Hu, W., Zhang, R., Ren, Z., Onck, P. R., Sitti, M.
Bioinspired cilia arrays with programmable nonreciprocal motion and metachronal coordination
Science Advances, 6(45):eabc9323, 2020 (article)
2019
Ziyu Ren, T. W., Hu, W.
A magnetically-actuated untethered jellyfish-inspired soft milliswimmer
Robotics: Science and Systems, June 2019 (conference)
Ren, Z., Hu, W., Dong, X., Sitti, M.
Multi-functional soft-bodied jellyfish-like swimming
Nature communications, 10(1):2703, 2019 (article)

Hakan Ceylan, I. C. Y. U. K. W. H. M. S.
Translational prospects of untethered medical microrobots
Progress in Biomedical Engineering, 1, pages: 012002, 2019 (article)
2018
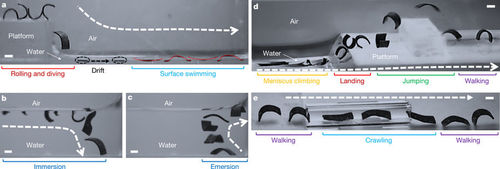
Hu, W., Lum, G. Z., Mastrangeli, M., Sitti, M.
Small-scale soft-bodied robot with multimodal locomotion
Nature, 554, pages: 81-85, Nature, January 2018 (article)

2017
Hu, W., Ohta, A. T.
Editorial for the special issue on microdevices and microsystems for cell manipulation
Micromachines, 8(9):276, 2017 (article)
2016
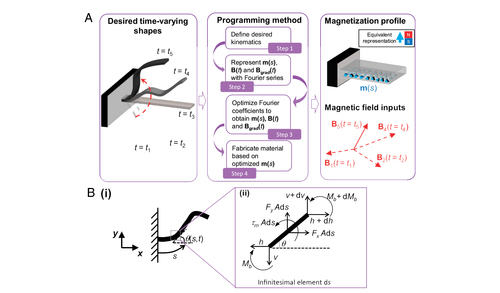
Lum, G. Z., Ye, Z., Dong, X., Marvi, H., Erin, O., Hu, W., Sitti, M.
Shape-programmable magnetic soft matter
Proceedings of the National Academy of Sciences, 113(41):E6007–E6015, 2016 (article)
2015
Sitti, M., Ceylan, H., Hu, W., Giltinan, J., Turan, M., Yim, S., Diller, E.
Biomedical applications of untethered mobile milli/microrobots
Proceedings of the IEEE, 103(2):205-224, IEEE, March 2015 (article)